28RYSE Low Voltage Series Servo Motor
Product Detail
The servomotor can control the speed, position accuracy is very accurate, can convert the voltage signal to the torque and speed to drive the control object. The rotor speed of the servomotor is controlled by the input signal and can respond quickly. In the automatic control system, it is used as an actuator with the characteristics of small electromechanicaltime constant, high linearity and starting voltage, etc. It can convert the received electrical signals into angular displacement or angular velocity output on the motor shaft. It can be divided into DC and AC servo motors. Its main feature is that when the signal voltage is zero, there is no rotation phenomenon, and the rotation speed decreases uniformly with the increase of torque.
Electrical Specifications
| Motor Model | 28RYSE242240 | 28RYSE243340 | 28RYSE244440 |
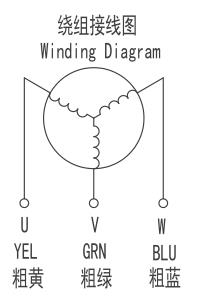
| Number of Phase | 3 | ||
| Number of Poles | 8 | ||
| Rated Voltage(VDC) | 24 | ||
| Rated Speed(Rpm) | 3000 | ||
| Rated Torque(N.m) | 0.053 | 0.08 | 0.106 |
| Rated Power(W) | 22.2 | 33.5 | 44.4 |
| Rated Current(A) | 1.32 | 2 | 2.64 |
| Peak Current(A) | 3.96 | 6 | 7.92 |
| Peak Torque(N.M) | 0.159 | 0.24 | 0.318 |
| Rotor Inertia(kg.cm2) | 0.015 | 0.02 | 0.025 |
| Torque Constant(N.m/A) | 0.05 | 0.05 | 0.05 |
| Torque Constant(V/krpm) | 4.6 | 4.6 | 4.6 |
| Line-Line Resistance(Ω) | 1.2 | 1.1 | 1 |
| Line-Line Inductance(mH) | 0.9 | 0.8 | 0.7 |
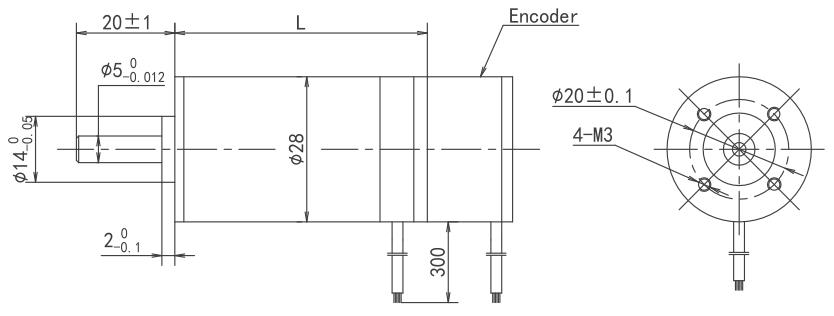
| 机身长度L Length(mm) | 49 | 59 | 69 |
| Weight(kg) | 0.4 | 0.6 | 0.8 |
| Encoder Resolution(P/R) | 100,010,242,500 | ||
*Note: We can manufacture products according to customer’s requirements.
Wiring Diagram
Dimensions(Unit: mm)