


36mm Slotless Brushless DC Motor
Slotless Brushless DC Motor, 36ZWWC60 can avoid the pulsation of air gap magnetic induction caused by uneven magnetic resistance in the teeth.It can eliminate the pulse loss in the armature core and t···
Motor Characteristics
| Motor part number | 36ZWWC60 | |||||
|---|---|---|---|---|---|---|
| Pole pair | 1 | 1 | 1 | 1 | 2 | |
| Phase resistance(Ω) | 0.6 | 0.68 | 1.45 | 2.1 | 0.41 | |
| Phase inductance(mH) | 0.08 | 0.1 | 0.19 | 0.27 | 0.042 | |
| winding connection method | Star shape | Star shape | Star shape | Star shape | Star shape | |
| Insulation class | B | B | B | B | B | |
| Duty type | S2 | S2 | S2 | S2 | S1 | |
| Feedback method | Hall sensors | Hall sensors | Hall sensors | Hall sensors | Hall sensors | |
| Commutation angle | 120° | 120° | 120° | 120° | 120° | |
| Insulation strength (Withstand voltage) | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | |
| Insulation resistance | 100 MΩ/500VDC | 100 MΩ/500VDC | 100 MΩ/500VDC | 100 MΩ/500VDC | 100 MΩ/500VDC | |
| Weight(g) | 270 | 270 | 270 | 270 | 270 | |
| Rated voltage(V) | 18 | 24 | 36 | 48 | 24 | |
| Rated power(W) | 68 | 69 | 74 | 85 | 85 | |
| Rated torque(mN·m) | 70 | 70 | 70 | 70 | 100 | |
| Rated speed(RPM) | 7340 | 9345 | 10000 | 11700 | 8100 | |
| Rated current(A) | 4.97 | 3.78 | 2.59 | 2.21 | 4.8 | |
| No load speed(RPM) | 10000 | 11000 | 11500 | 13000 | 10300 | |
| No load current(A) | 0.37 | 0.37 | 0.22 | 0.2 | 0.36 | |
| Motor efficiency(%) | 76 | 76 | 79.5 | 80 | 84.4 | |
| Noise (Ambient noise 20db, test distance 1m)(dB) | <50 | <50 | <50 | <50 | <50 | |
| Case - Environmental thermal resistance (no load)(K/W) | 0.42 | 0.43 | 0.44 | 0.36 | 0.58 | |
| Motor thermal time constant (no load)(S) | 1350 | 1350 | 2700 | 1080 | 1330 | |
| Ambient temperature(℃) | 21.1 | 23.1 | 20.1 | 20.4 | 19.5 | |
| Max. winding temperature (no load)(℃) | 49.4 | 52.9 | 52.8 | 50.8 | 69.3 | |
| Torque constant(mN·m/A) | 14.08 | 18.50 | 27.07 | 31.62 | 20.83 | |
| Back-EMF constant - peak value(V/Krpm) | 2.09 | 2.74 | 4.01 | 4.68 | 3.08 | |
| Back-EMF constant - effective value(V/Krpm) | 1.47 | 1.94 | 2.83 | 3.31 | 2.18 | |
| Peak torque(mN·m) | 422.47 | 653.09 | 672.16 | 722.82 | 1219.51 | |
| Peak current(A) | 30 | 35 | 25 | 23 | 59 | |
| Inertia moment(g·cm²) | 39 | 39 | 39 | 39 | 39 | |
| mechanical time constant(ms) | 11.80 | 7.75 | 7.72 | 8.19 | 3.68 | |
| End bell | Stainless steel | Stainless steel | Stainless steel | Stainless steel | Stainless steel | |
| Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | Deep Groove Ball Bearing | |
| Magnet | Sinter NdFedB | Sinter NdFedB | Sinter NdFedB | Sinter NdFedB | Sinter NdFedB | |
| Rotation shaft | Carbon Steel | Carbon Steel | Carbon Steel | Carbon Steel | Carbon Steel | |
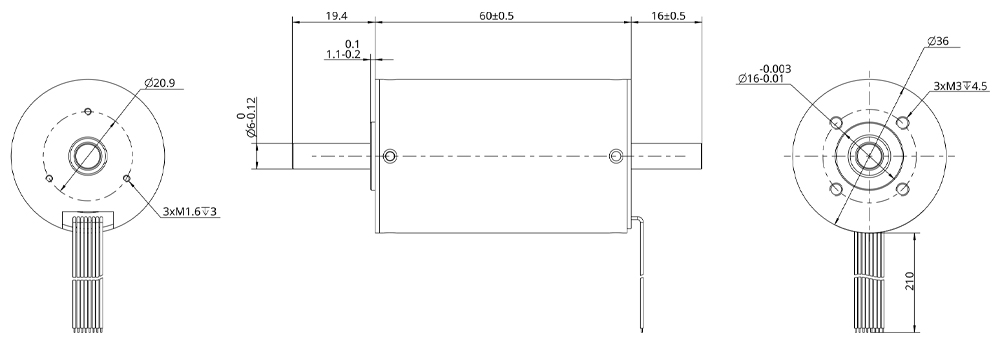
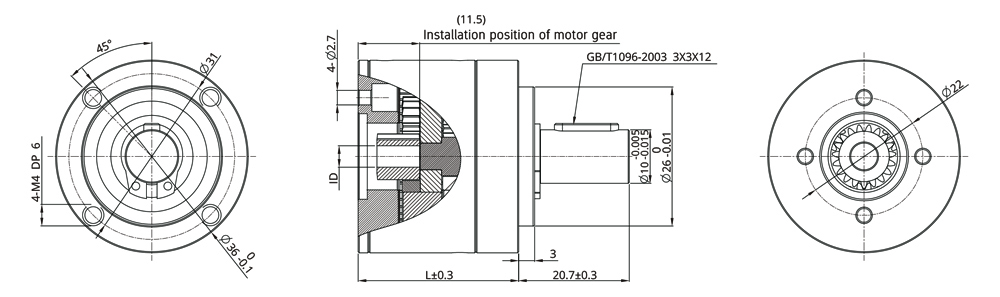
Dimensional Drawing
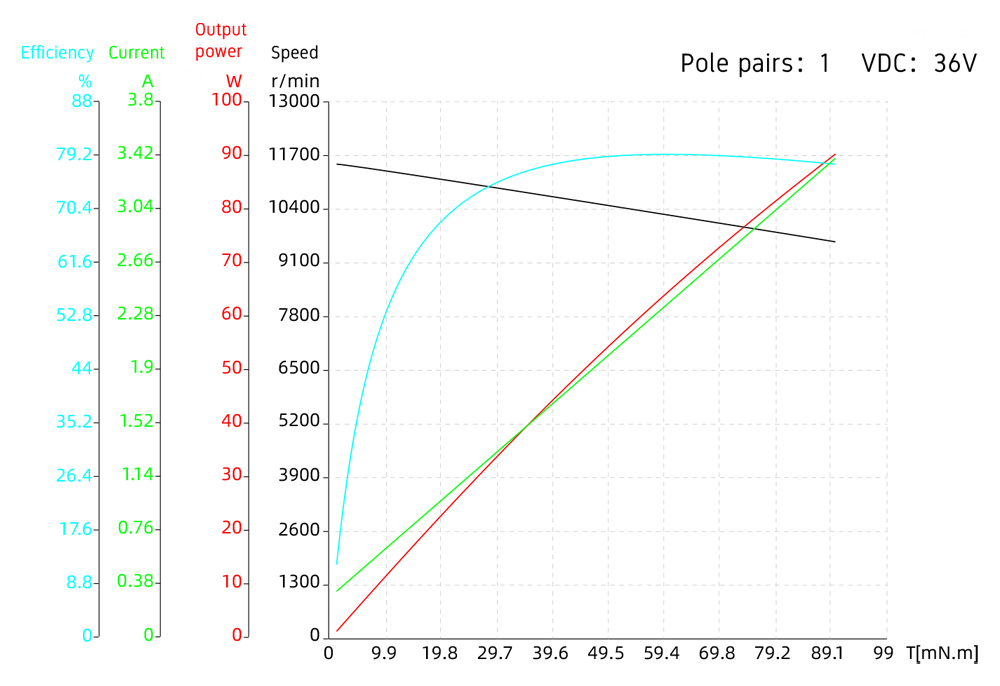
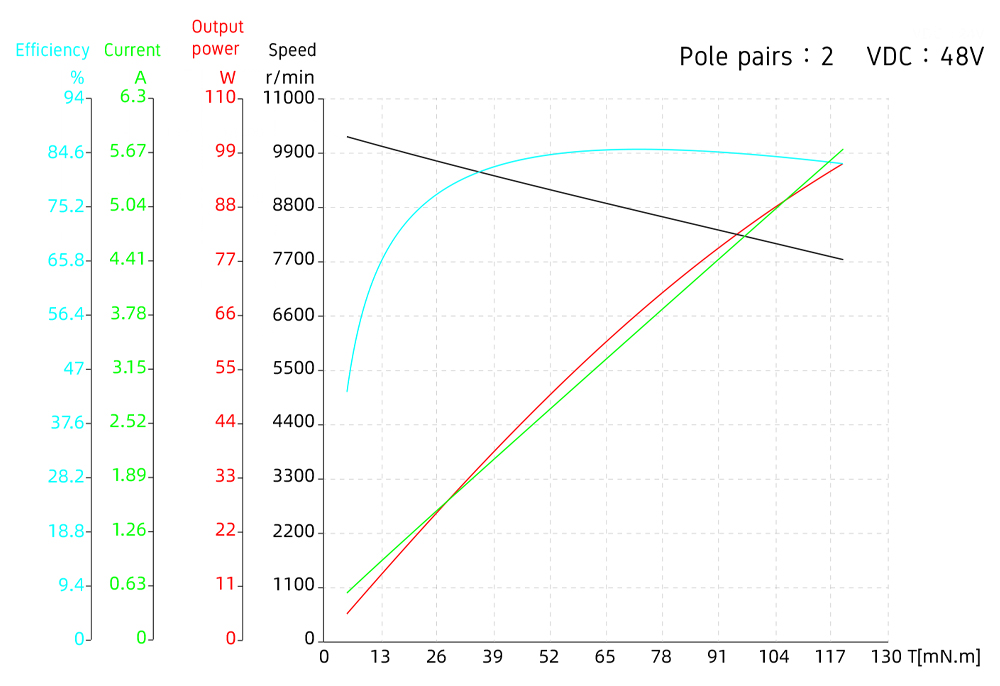
Torque Performance Curves
1 Pole pairs
2 Pole pairs
Options
Precision Planetary gearbox
Series - 1 level 2 level 3 level 4 level Total speed ratio X : 1 3.947 5.308 16 21 26 28 35 62 83 103 111 138
150 172 186 231243 326 406 439 546 590 679 734
794 913 987 1135 1227 1526Max. continuous torque N.m 3.3 9 11 12 Max. Continuous output power W 220 130 60 40 Max. continuous input speed rpm 5000 6000 7000 7000 Max. efficiency % 90 80 75 65 Max. back gap ° 0.5 0.6 0.6 0.6 Motor gear hole (ID) mm Φ4 Φ5 Φ4 Φ5 Φ3 Φ4 Φ5 Φ3 Φ4 Φ5 Gearbox length L mm 30 44.7 51.3 58 Weight g 212 304 343 381